I have a simple shoebox model for testing different venetian blind configurations. I have two questions/concerns about the simulation output.
-
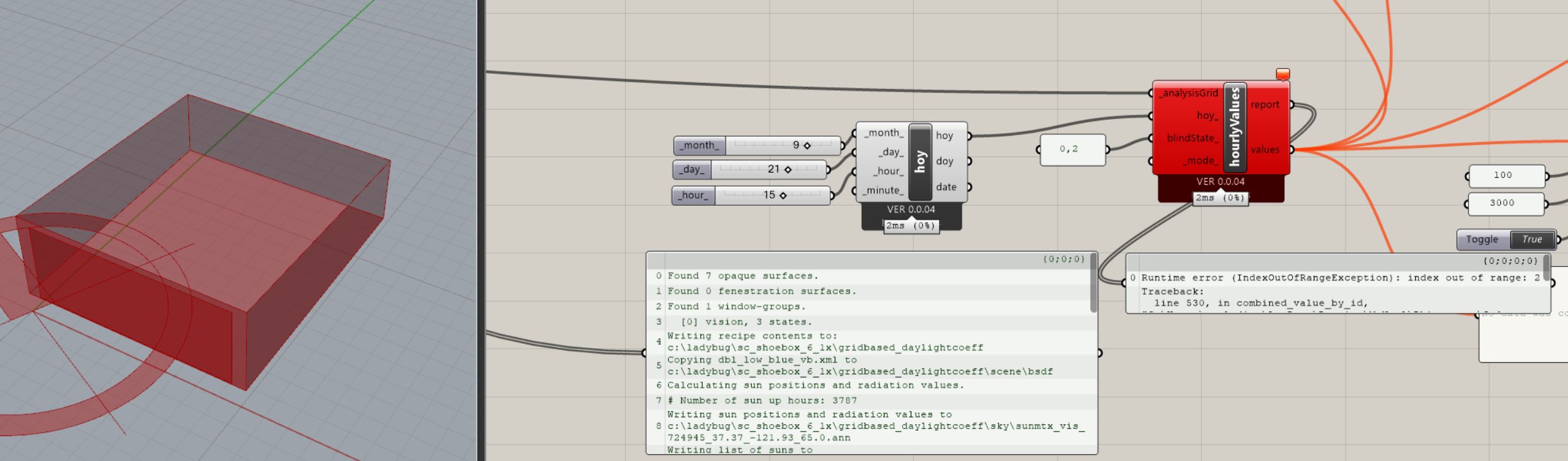
The blindState input for visualizing the output requires two values, although I only have one window group. I would expect to provide just one value, since I only have one window group in the model. Also the window group I modeled has 3 states, but I get a out of range error when I enter a ‘2’ to visualize the third state.
-
In addition to bsdf files representing composite window systems with venetian blinds I have parametric blinds modeled in gh. If I run a simulation with this geometry in the scene I can see the impact in the simulation output, but if I add the parametric geometry to a blind-state it doesn’t show up in the results.
Any ideas?